1. Parametrización de curvas
Desde el punto de vista de la física, el movimiento de una partícula en el espacio se puede describir por su posición
en función del tiempo
, es decir, la posición
en el instante
es
El vector posición en el tiempo
se denota
- 1
- En ,
- 2
- En ,
- 1
- Si una función vectorial
es continua en
entonces a la representación gráfica de
se le llama curva y decimos que esta curva esta descrita paramétricamente por
Escribimos
- 2
- Si la curva
tiene ecuación
y si
satisface la ecuación de ,
es decir, ,
entonces
es una parametrización de .
Esto dice: " es una parametrización de , si el gráfico de está contenido en el gráfico de ". No es raro que una sola función no pueda parametrizar toda la curva.
- 3
- Una parametrización continua se le llama trayectoria.
Consideremos la elipse de ecuación canónica
- 1
- La función
es una parametrización de la elipse.
Para verificar esto, debemos mostrar que satisface la ecuación de la elipse, ya con eso, el gráfico de está contenido en el gráfico de la de la elipse.
Tenemos entonces sustituimos en la ecuación de la elipse
- 2
- La función
es una parametrización de la elipse.
Para verificar esto, debemos mostrar que la parametrización satisface la ecuación de la elipse.
Tenemos entonces sustituimos en la ecuación de la elipse
- 3
- La trayectoria
parametriza totalmente a la elipse, mientras que la función
deja al vértice 1
por fuera. En efecto,
Pero si entonces pues .
No hay problema en esto, porque una parametrización solo debe tener su gráfico contenido en el gráfico de la curva.
Parametrización de curvas en
No siempre es fácil encontrar una parametrización de una curva en
Veamos
algunos casos sencillos.
- 1
- Si
con
entonces podríamos tomar como parámetro a
una parametrización puede ser
Los segmentos se parametrizan como con
Los segmentos se parametrizan como con
- 2
- Si
con
entonces podríamos tomar como parámetro a
una parametrización puede ser
La circunferencia se puede parametrizar como
Si el centro está en entonces
se hace una traslación: Si
entonces
La parametrización trigonométrica de una elipse se obtiene de la parametrización trigonométrica de la circunferencia unitaria, con escalado independiente en cada eje. Como vimos en el Ejemplo 54, una elipse de ecuación canónica
se puede parametrizar con funciones trignométricas:
Se puede parametrizar como
Se puede parametrizar como
Como y como entonces Es decir,
satisfacen la ecuación de la hipérbola
- 1
- Ecuación canónica:
Se puede parametrizar (en dos ramas) con
- 2
- Ecuación canónica:
Se puede parametrizar (en dos ramas) con
- 1
- En el caso de la hipérbola, para estas parametrizaciones, nos da el vértice en la rama respectiva.
- 2
- La parametrización de la hipérbola usando las funciones hipérbolicas no presentan singularidades y gozan de simetría.
- 3
- En este caso el parámetro no es un ángulo, más bien (en el caso de una hipébola centrada en el origen) es dos veces el área (orientada) de la región entre la hipérbola, el eje focal y un rayo del origen al punto (ver Figura 3.2).

Consideremos la curva con
Como
Sea con unitarios y ortogonales. Entonces si tenemos una curva la curva en el plano tiene parametrización
Por ejemplo, la elipse la podemos poner sobre el plano (con base ortonormal) y la parametrización sería

Solución. Como son funciones del tipo podemos usar como parámetro.
Para las siguientes cónicas, parametrice y realice la representación gráfica
- 1
- 2
- 3
Solución.
- 1
- La elipse
tiene ecuación canónica
Entonces una parametrización trigonométrica es (Figura 3.3)
- 2
- La hipérbola
tiene ecuación canónica
en el plano . El centro es y abre en dirección del eje
Una parametrización trigonométrica, en dos ramas, es (Figura 3.4)
- 3
-
es la ecuación canónica de una circunferencia en el plano ,
de centro
y radio
(Figura 3.5)
Una parametrización trigonométrica de la circunferencia entera es
Para parametrizar solo la parte se debe establecer el recorrido del ángulo. Como entonces
Por tanto la parametrización del trozo de circunferencia es



Parametrización de rectas y segmentos en
- 1
- Rectas en
Si la recta
pasa por
en dirección de
entonces una parametrización es
- 2
- Segmentos. El segmento de recta
que inicia e
y termina en
se puede parametrizar como
En este caso, y y el punto medio del Segmento es
- 3
- Segmentos paralelos a los ejes. Aunque estos segmentos es un caso especial de "segmentos de a ", la parametrización sencilla es seguir el eje.
Propósito: Explorar distintas formas de parametrizar rectas y segmentos en , variando el parámetro :
- 1
- Segmento : Al restringir , trazamos un segmento acotado desde el punto base hasta .
- 2
- Recta : Definida por
un punto base y
un vector director .
Su ecuación es:
- 3
- Segmentos paralelos a los ejes: Se obtienen al mantener dos coordenadas constantes y variar la tercera. Por ejemplo, segmento
paralelo al eje
que inicia en
y finaliza en :
 En la recta y el
segmento que va de
a , se puede
seleccionar el vector
y el punto
con el ratón (en los segmentos no).
En la recta y el
segmento que va de
a , se puede
seleccionar el vector
y el punto
con el ratón (en los segmentos no).
Determine una parametrización para
(Figura 3.6).

Parametrización de curvas en
Algunas curvas en se pueden
parametrizar usando como parámetro
o
En otros
casos se se puede usar un ángulo como parámetro. En este apartado solo se consideran estas posibilidades aunque existen otros
métodos más aavanzadas.
Si las curvas se obtienen como un problema de intersección de superficies, con la ecuación de estas superficies se puede
deducir una parametrización a partir de la la proyección de la curva de intesercción en algunos de los planos
coordenados.
- 1
- Curva en el plano :
- 2
- Curva en el plano :
- 3
- Curva en el plano :
Parametrice en las siguientes cónicas
- 1
- 2
- 3
Solución.
- 1
- La elipse
tiene ecuación canónica
en el plano .
Entonces una parametrización trigonométrica es (Figura 3.7)
- 2
- La hipérbola
tiene ecuación canónica
en el plano . El centro es y abre en dirección del eje
Una parametrización trigonométrica, en dos ramas, es (Figura 3.8)
- 3
-
es la ecuación canónica de una circunferencia en el plano ,
de centro
y radio
(Figura 3.9)
Una parametrización trigonométrica de la circunferencia entera es
Para parametrizar solo la parte se debe establecer el recorrido del ángulo. Como entonces
Por tanto la parametrización del trozo de circunferencia es



Orientación
Una parametrización ordena los puntos en una curva en el siguiente sentido: precede a si (es decir, precede a en ).
Algunas trayectorias ya tienen su propia orientación y la parametrización
puede ser que respete o no respete esta orientación. Por supuesto, una curva
puede
tener varias parametrizaciones.

- 1
- parametriza una curva e induce una orientación en : Inicia en y termina en
- 2
- Si parametriza una curva , la parametrización con , invierte la parametrización pues inicia en y termina en
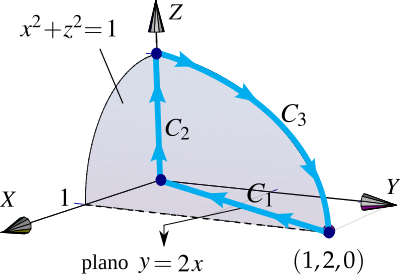
Consideremos las curvas
- 1.
- 2.
- 3.
tal y como se muestra en la Figura 3.11
Orientación inducida. Una parametrización para
es
Esta parametrización induce una orientación en
pues determina donde inicia y donde termina, como se muestra en la Figura 3.12



Parametrización de curvas de intersección.
Consideremos dos superficies
y . Para
parametrizar una curva de intesercción estre estas dos superficies, si nos es muy complicado, parametrizamos una proyección de
esta curva en alguno de los planos coordenados. Con eso obtenemos dos componentes de la paramatrización final y, la tercera
componente la obtenemos con la ecaución de cualquiera de las dos superficies.
Es decir, primero determinamos una ecuación de una proyección de la curva de intersección, para esto resolvemos (en las variables del plano de proyección elegido)
Y luego parametrizamos la proyección.
Consideremos el cilindro (primer octante) y el plano . Determinar una parametrización para la curva de intersección entre el cilindro y el plano , con base en la proyección de esta curva de intersección sobre cada plano coordenado.
Solución.
Análisis. Vamos a resolver este problema de tres maneras diferentes, proyectando la curvas de intersección en cada plano coordenado. Llamamos a la curva de intersección.
- 1
- Proyectando sobre .
Queremos una ecuación .
- (a)
- En este caso, como
esta en el plano
y este plano es perpendicular al plano ,
entonces la proyección tiene ecuación .
El cilindro tiene como directriz una circunferencia de radio con cetro en , por lo que pues ese es el recorrido de en el cilindro, en el primer octante.
- (b)
- Proyección
- (c)
- (d)
- Como entonces , es decir, puede pasar o .
- (e)
- (Figura 3.14)
- 2
- Proyectando sobre .
Queremos una ecuación .
En este caso, el cilindro
es perpendicular al plano XZ, por lo que la curva de proyección es la misma directriz del cilindro: Media circunferencia
con
(primer octante).
- (a)
- Proyección
Observe que entonces .
- (b)
- (c)
-
esta en el plano ,
por tanto como ,
nos queda
(Figura 3.15)
- 3
- Proyectando sobre .
Queremos una ecuación .
- (a)
- Proyección
Observe que, como la circunferencia tiene radio y el centro está en , entonces , es decir
.
- (b)
- (c)
-
esta en el plano ,
por tanto como ,
nos queda
(Figura 3.16)



Determine la curva de intersección entre el Cono y el Parabolide (Figura 3.17)

Solución. Vamos a proyectar sobre el plano
para obtener la proyección de la curva de intersección. Se necesita una curva de proyección
Completando el cuadrado obtenemos la ecuación canónica de la proyección de la curva de intersección (una
elipse)
- 1.
- Proyección:
- 2.
- Curva de intersección:
- 3.
-
esta en el Cono ,
entonces
(Figura 3.18)



- 1.
- Parametrización de la curva
- 2.
- Parametrización de la curva


- 1.
- 2.
- 1.
- 2.


- 1.
- 2.
- Proyección
- 3.
- Curva de intersección


- 1.
- 2.
- Proyección
- 3.
- Curva de intersección
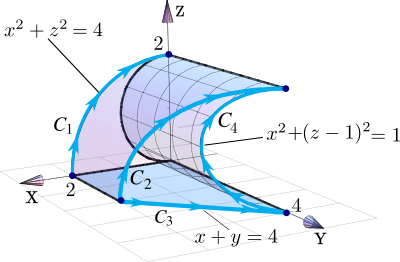
 Determine la curva
de intersección entre
y
(Figura 3.24)
Determine la curva
de intersección entre
y
(Figura 3.24)


- 1.
- 2.
- Proyección
- 3.
- Curva de intersección
- 4.
- Calculo del intervalo
- (a)
- Las circunferencias
y
se cortan en
- (b)
- Ahora, como
y ,
obtenemos los ángulos adecuados (en el 3er y 4to cuadrante)
 Determine la curva
de intersección
y en el
primer octante. (Figura 3.25)
Determine la curva
de intersección
y en el
primer octante. (Figura 3.25)


- 1.
- La proyección es una hipérbola:
- 2.
- Nos intersa solo la rama "derecha" de la hipérbola:
- 3.
- Proyección
- 4.
- Curva de intersección
- 5.
- Calculo del intervalo .
La proyección de la curva de intersección llega hasta el borde de la elipse, es decir,
,
entonces
Entonces y (pues estamos esolo en el 1er octante).
Ejercicios con widget como asistente.
Propósito: Asistente para verificar una parametrización de la curva de intersección entre dos superficies.
Ejemplos.
- 1
- Curva de intersección entre las superficies
F1: x^2+y^2=1yF2: z=x^2+y^2
- (a)
- Parametrización:
- (b)
- Intervalo:
- 2
 Curva de intersección entre las superficies
Curva de intersección entre las superficies F1: x^2+y^2=z^2yF2: x=4-y^2-z^2
- (a)
- Parametrización: Aquí escribir el código requiere mucho cuidado porque
x(t)=(-1/2 + (sqrt(17)/2)*cos(t)
y(t)=(sqrt(17)/(2*sqrt(2)))*sen(t)
Pero como es para graficar, podemos usar una aproximación numérica:z(t)=sqrt( (x(t))^2+(y(t))^2 )
- (b)
- Intervalo:
Determine y grafique usando una parametrización (posiblemente trigonométrica), de la intersección entre las siguientes
superficies:
- 1.
- y
- 2.
- y
- 3.
- y
- 4.
- y
- 5.
- y
- 6.
- y